
BEHAVIORRobotSuite
by Stanford UniversityBEHAVIOR Robot Suite (BRS) is a framework developed by Fei-Fei Li's team at Stanford University for learning whole-body manipulation to complete daily household tasks.
BEHAVIOR Robot Suite
Introduction
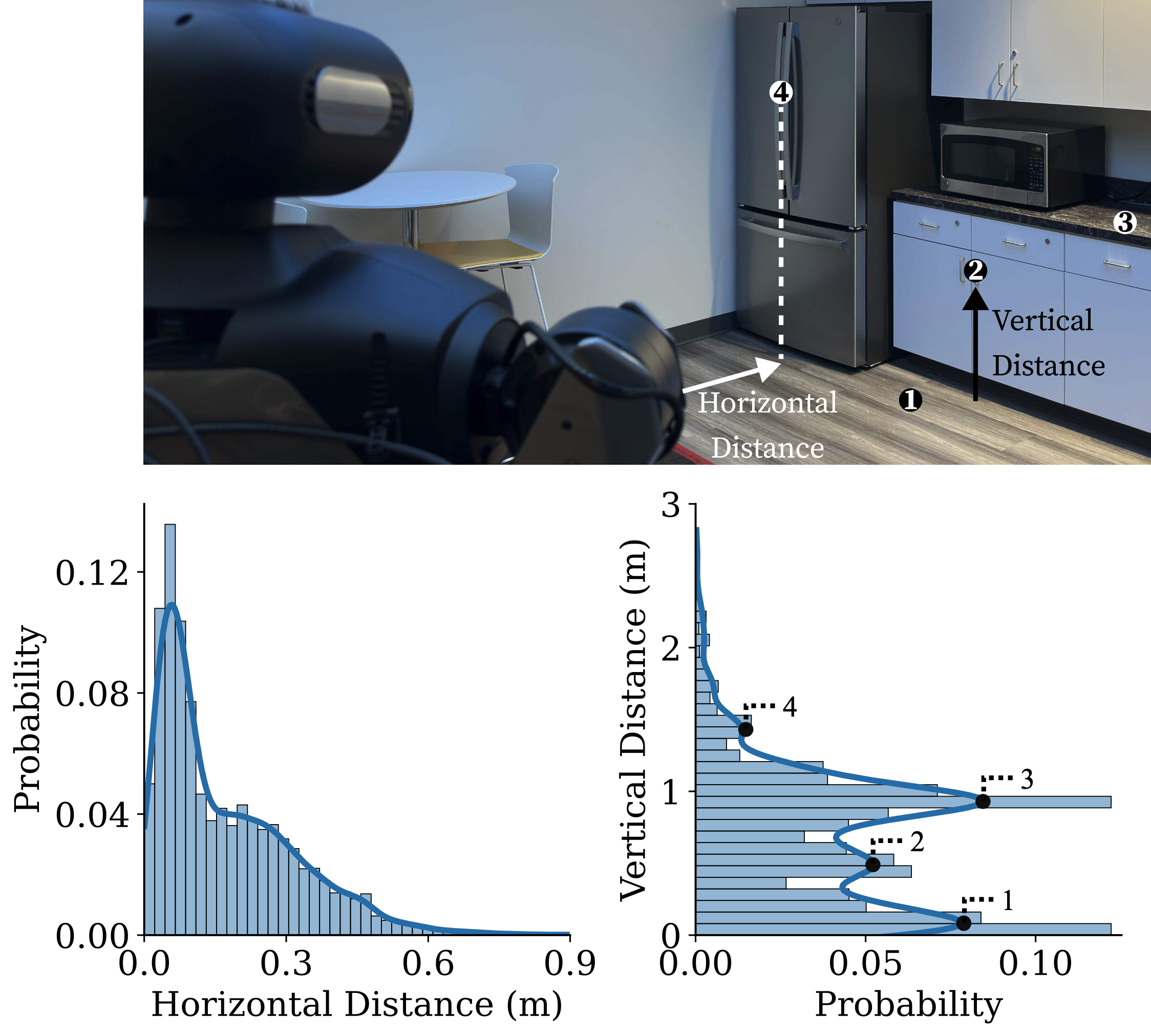
BEHAVIOR Robot Suite (BRS) is a framework developed by Fei-Fei Li's team at Stanford University to enable robots to perform complex household tasks through whole-body manipulation. It addresses key challenges in robotics, such as bimanual coordination, stable navigation, and extensive end-effector reachability, making it highly effective in real-world environments.
Key Features
- Whole-body manipulation: Completes tasks like carrying heavy objects, opening doors, and cleaning.
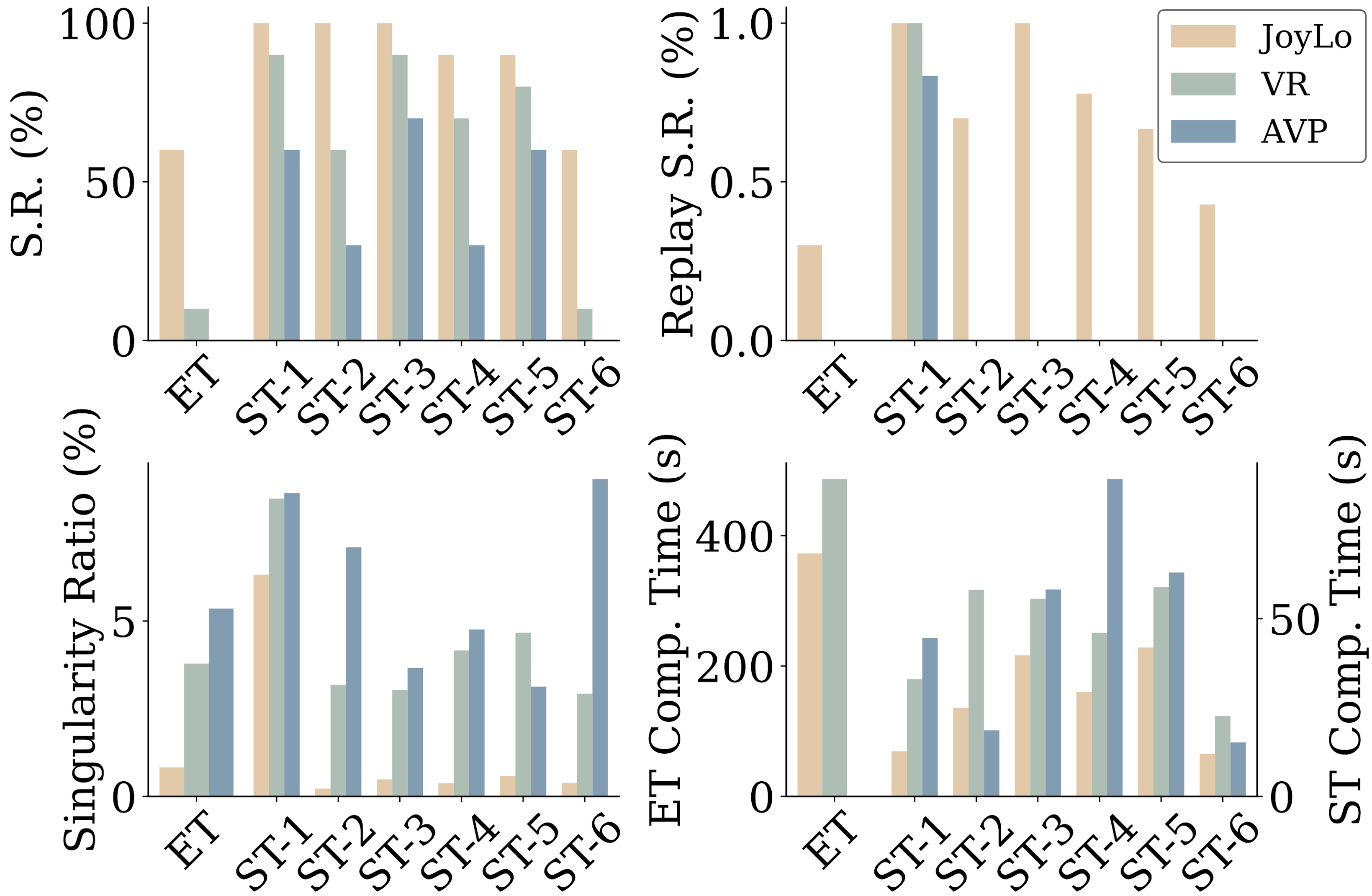
- Efficient data collection: Uses JoyLo, a low-cost teleoperation interface, for high-quality data collection.
- Advanced learning algorithm: WB-VIMA models hierarchical whole-body movements and uses multimodal data for precise control.
- Real-world adaptability: Interacts with everyday objects in complex environments.
- Fault recovery: Automatically detects and corrects errors during operations.
Technical Details
- JoyLo: A low-cost teleoperation interface using hardware like Nintendo Joy-Con for precise whole-body control.
- WB-VIMA: An imitation learning algorithm that decomposes whole-body movements and uses self-attention to aggregate multimodal data.
Use Cases
- Household chore automation: Cleaning rooms, placing items on shelves, and putting away dishes.
- Garbage disposal: Moving trash bags from indoors to outdoor bins.
- Clothing organization: Taking clothes out of the wardrobe and placing them on the sofa.
- Bathroom cleaning: Cleaning the toilet and pressing the flush button.
- Daily item management: Opening the dishwasher and managing items.
Getting Started
Visit the official website for documentation, code, and datasets.
Framework Features
Supported Tasks
Household Chore Automation
Garbage Disposal
Clothing Organization
Bathroom Cleaning
Daily Item Management
Tags
Robotics
Automation
AI
Machine Learning
Whole-Body Manipulation
Teleoperation
Imitation Learning
Household Tasks
Bimanual Coordination
Real-World Applications
Getting Started
Pricing
free
Screenshots & Images
Additional Images
Stats
0
Views
0
Favorites
Community & Support
Similar Frameworks
Helping everyone find the best AI for their work and daily life through deep analysis and honest comparisons.
Categories
Stay Updated
Get notified about new AI tools, models, and insights.
© 2026 BestAI. All rights reserved.









